|

CNC ROBOTIC ABSTRACT PHOTOGRAPHY
About RC-ACR, a remotely operated camera control system
and other robotic cameras designed and built by Mark Lindquist.
Remote Control Articulating Camera Robot
(RC-ACR)
By Mark Lindquist |
January 23, 2016
© Lindquist Studios All Rights
Reserved
I began building a CNC Photography Robotics system based on a large
robot I had designed and built in the late 1980’s
called OPRA (Omni Positional Remote Articulator)
that is controlled by 90VDC open-loop controllers.
I built a consolidated control panel in order to manage all the robots in my
studio at the same time.

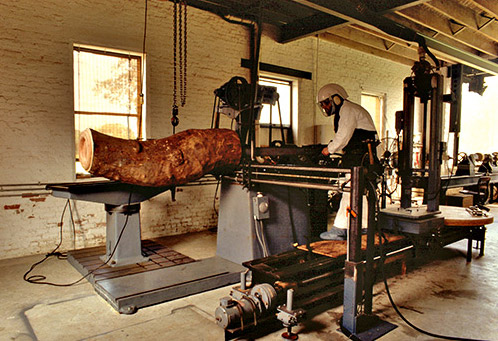
OPRA was designed and built by me in 1989, with fabrication
assistance from my then studio assistant Roger Paph.
(See control panel I built in the center, background, below).
I designed it to help me position wood being sculpted so that I could
sit while working.
I had had a severe automobile accident and couldn’t bend well, so I
built the robots to help with ergonomics.

Mark Lindquist sculpting wood being held and positioned by his robot
OPRA (controller in background.)
Photo: John McFadden
Mark Lindquist with his robot ASTRO (Assigned Specific
Task Robotic Operative), (background) - Lindquist
Studios circa 1990
Photo: Roger Paph / Lindquist Studios
90 volt DC controllers are fantastic, especially when they are
four-quadrant controllers, that enable “plug reversing”.

Mark Lindquist working with his robotic control panel in studio while
being filmed for the movie: Soul’s Journey.
Photo: John McFadden
In the nineties I began experimenting with OPRA to use it with
photography. Basically, I created an end-effector holding system that
would enable me to put a camera on it instead of a bowl. A little big
and heavy, but worked well.
Here at the beginning of the RoboCam project, the Nikon D810 camera is
mounted on OPRA.
This worked well, but couldn’t be repeatable as it was controlled
by DC motor controllers
and as Matt Cardwell put it, “would need a crane to position it in the
field.”
My youngest son, Josh Lindquist, who has been a software design engineer
at Microsoft for 18 years
encouraged me to automate OPRA to be able to get repeatability.
So I began designing and building a stepper motor system to be
lightweight, portable, and versatile.
I started by wanting to buy a Cognisys system. When I found out that the
Cognisys system would not run at the speeds
I calculated I needed, I began to investigate building a miniature
version of OPRA. OPRA worked beautifully, ultra smooth, exceptional
stability, and a joy to use. Unfortunately, REALLY heavy.
About that time, some collector friends, Dr. and Mrs. Matthew Cohen
bought a piece of my sculpture as a kind of grant to enable me to buy or
build the robotics I needed to automate my existing photographic process
of motion blur.
I very much appreciate Matt and Leslie’s contribution to the project. I
spent 3-4 times what they
had given for the sculpture in the end, and I’m still going, but I’m
slowing down.
I began by attempting to build a system that was similar to the Cognisys
rotary tables which ran at an 80:1 ratio.
After lengthy discussions with Matt Cardwell, (Cognisys)
I realized I had to build my own system.
I started by purchasing a Cognisys Stackshot controller and a stackshot
extended rail.
Not being able to use their rotary table, which was a disappointment, I
found several special
miniature gear heads on ebay and after buying them realized that the CNC
stepper motors
wouldn’t fit the housings and they would need to be modified.
I contacted Jeffery Woodcock, (picengrave)
a local master machinist
who currently owns and operates a laser engraving software business.
Jeff has done machine and CNC work for me over the years. We’re talking
serious skills.
Jeff modified several gear heads adapting them to accept Nema 17 stepper
motors and hybrid steppers.
It’s small, precision work, and as I found out after re-working several
in order to accommodate
different motors or adding sound dampening components, it’s tedious,
demanding work.
All of the design work was experimental. I’d try one design only to
find out the gear head wouldn’t
hold the camera in certain positions, or it would overheat. Back to
the drawing board.
Perhaps the biggest problem I ran into was oscillation or sympathetic
vibration, called resonance.
This was most prevalent in the low to mid-band frequencies.
Matt Cardwell helped me with that, suggesting sound dampening means be
imposed.
I used industrial felt in some cases as well as vulcanized rubber
and inertial dampers. The inertial dampers are tricky. They either work
or they don’t work.
The one constant is that they are expensive, even when bought new or off
of eBay.
Here is the first working prototype with gear heads adapted and modified
with inertial dampers:

Jeff Woodcock adapted the gear housings to accept the hybrid
stepper motors he introduced me to
and contributed a very nice CNC manufactured base (to the right in the
photo above) to an old
very expensive gearbox I had. He also threaded the shaft. In each case,
I built
the brackets and designed a mounting system around the Arca style quick
clamp photo camera holding system.
Notice the yellow inertial dampers that I adapted to the incoming and
outgoing shafts.
This was the initial prototype. After all this work, it turned out that
the 1:1 gearing, while it gave me the speed I thought I needed could not
hold the weight of my camera when in a rotated position. Increasing the
torque held, but during a shooting session, prolonged use resulted in
overheating. Additionally, it turned out that even as precise as these
gear heads are, they still have backlash, which becomes magnified with
weight.
So as it stands, unfortunately, the lightweight RoboCam won’t work for
use with my Nikon D810 or D3s cameras
which is what I designed it for. I understand how this happens -
design something based
on a theory and create a prototype. It either works or it doesn’t.
So I keep the “lightweight model” with hope that one day a new model
camera will come out that
will do everything the D810 will, but will be super lightweight.
I very much appreciate Jeff Woodcock’s metal lathe work adapting stepper
motors to my gearheads.
It was very helpful to me
in the early phases of developing my prototype.
When I began the project, I was recuperating from having major surgery.
I simply couldn’t work.
Jeff Woodcock’s help with the project enabled me to get started, and
when I saw his work,
I understood the requirements of working on a small scale and began
gradually, to do the work myself,
particularly as he encouraged me to do so. I appreciate everything he
did helping me with my prototype.
Some of those early components are still in use in the current model. Jeff
also did a brilliant
DC motor mount on a studio camera stand I have with an elevation column.
I gradually moved on to build a much heavier system with much heavier
gearboxes that will hold the camera.
I’m still working on it and continuing to develop advances doing the
machining myself.
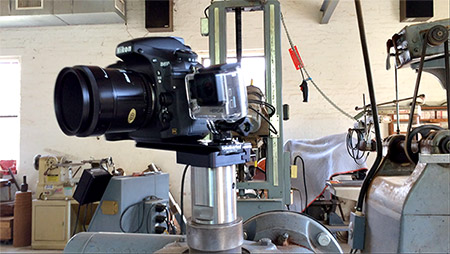
This is the second major prototype utilizing Nema 23 Hybrid Stepper
Motors, intermediary gear reducers
sound attenuating dampers and inertial damper. Majestic Tripod,
Nikon D3s camera, with 50mm Nikkor lens.
This is somewhat portable to be able to take in the field, although not
a "back-packable rig" yet.
The arm will fold back down parallel with the motor shaft for 360 degree
panos.

RC-ACR I- Lightweight portable system by Mark
Lindquist - 2015
I have made some images with the evolved system that I have built
subsequently.
Early images from the original prototype showed promise
but didn’t compare to the work done by hand over 15+ years of
development.

Early Robotic Camera Abstract Image by Mark Lindquist 2015

Remote Control Articulating Camera Robot
Abstract Image (RC-ACR) by Mark Lindquist, Late 2015.
Copyright ©
Lindquist Studios 2015/2016
All Rights Reserved
I learned a little metal turning/machining from my father,
woodturning pioneer Mel Lindquist when I was younger.
I wish I had paid more attention to that when he was alive. He was
at one point in his career a master machinist at
General Electric Company in SanJose, CA, then in Schenectady, NY.
He eventually became head of
Quality Control in his department and was a fellow of the American
Society of Quality.
Matt Cardwell really spent a lot of time explaining CNC theory to me and
everything that applied to their systems.
I have ended up having bought a fair amount of Cognisys components. It’s
super high quality and extremely lightweight for the application.
Matt is one really smart guy. I very much appreciate his technical
advice
encouragement and support with this project. Matt suggested
remediations to diminish resonance in the systems.
I'm using heavy gear boxes that I adapted to accept
large Nema 23 hybrid stepper motors,
with intermediary gear reducers. I created a special "sandwich" of
rubber gaskets and aluminum plates to help
reduce mid-band resonance. This design very closely resembles the
design/build I did with OPRA in the early nineties.
The through-shaft holds strong, lightweight aluminum arms. With
close to 180 degrees of travel they enable
all the movement I need in that direction. I use Cognisys
Stackshot extended rails in certain situations.
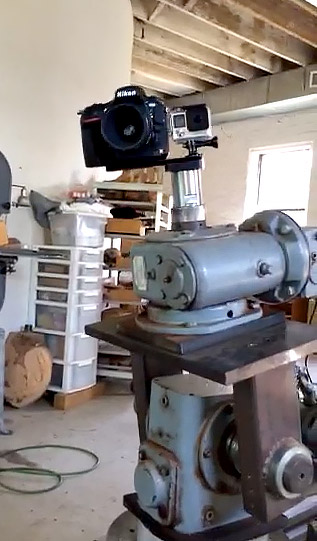
This is currently the main body of RC-ACR II. The heavier gear heads
and motors hold the gear and cameras well.
In a studio session, the motors don't overheat even when the robot is
operating for several hours.
There is a price to be paid however: it's NOT portable. No hiking
with this kit.

RC-ACR II by Mark Lindquist, late 2015 studio iteration - iphone photo
I use various heads with RC-ACR II for different effects.
RC-ACR II's base allows for quick changeouts.
This particular head is extremely smooth and is often used on the
"portable robot". I found an
ancient inertial damper (blue) on ebay that was in brand new condition
and it just worked beautifully.
This is a Nema 23 hybrid stepper
motor with an intermediary gear reducer
and a custom bracket I made for it. The camera is attached to the shaft
via a custom
machined fitting I made that accepts large machine nuts. I try to
use available manufactured parts and repurpose
them whenever possible. Since the robotic camera components are
interchangeable, RC-ACR I, and II can be
reconfigured, or additional robots can be configured for other
photographic purposes.

Since I use two Cognisys controllers I can assign 6 axes
arbitrarily to any motor/gearhead combos.
I have another set of Nema 23 gear head and arms that forms its
own robot or may be used to augment this iteration of RC-ACR II.
Cognisys Inc., Stackshot 3X 3-axis controller.
I very much appreciate the Cognisys controllers. With the two of
them in tandem, I can run
automated routines or simply position the camera. With this
system, which can be automated or static,
I can mimic handheld movements created over the years or have the
"ultimate tripod" moving components for positioning or panning, etc.
The StackShot 3X comes with watertight cables and a battery pack option.
All in all, it's a really tight, very well designed system for either
studio or field work.
Former (and occasional) studio assistant, photographer John McFadden
suggested I look into
a remote camera control system called CamRanger. John has an
encyclopedic knowledge of
camera equipment. A former photographic assistant to Greg Silker
(who does photography for Minn kota and Ranger), John is always current on
the
most recent advances in photographic gear. John's suggestion to use
CamRanger
has proved invaluable. He and I worked together on OPRA years
after it was built retrofitting a brake to the central turntable. I
always appreciate John's help.

Lindquist Studios Former Assistant, Photographer John McFadden -
Photo: Mark Lindquist
I use CamRanger almost exclusively, tethered wirelessly to my Nikon
cameras.
CamRanger's receiver mounts to the camera via a hotshoe mount I devised.

The beauty of CamRanger is that it works on several platforms. I
use it with my iPad.
It enables almost complete control of the camera wirelessly and works
off its own wi-fi.

Gradually, I’m beginning to get a handle on how the camera operates as
an end-effector on the robot with repetitive, programmable routines.
I’m beginning to understand the possibilities and the limitations of the
system.
Just as I accepted sympathetic vibration in some of the lathes I built
and incorporated the "defects" into the designs,
I am doing the same here, since backlash is heightened by weight, and
unavoidable within my budget.
Early on in my work as an artist, I developed a philosophy of not
fighting the materials, but rather accepting them.
The problems I cannot overcome in my designs and builds of the machines
become integral to the
designs of the art work. The irregularities represent a "gift of
the machine" in this philosphy.
The art I make comes from techniques developed over 20 years of working
with
motion blur and over 45 years working as a professional photographer.
That history has enabled me to know what to look for in designing and
building my robotic systems.
In my current work, I use hand-held techniques developed over 2 decades
in concert with
my new robotic camera. I don't just press a button either on the
camera or the camera robot.
My robotic systems are simply additional tools in the process of making my art.
The process involved in making images is painstaking and unforgiving.

Abstract Image made in part by using Mark Lindquist's CNC
robot RC-ACR II
In-camera creation - single exposure jpeg. RAW retained for
future editing.
Copyright ©
Lindquist Studios 2015/2016
All Rights Reserved
The experience of designing and building the current working model has
been rewarding and uniquely challenging.
I’m also working on 2 heavier duty models that I began building before
RC-ACR I, and hope to finish someday.
DROVER is a portable robot for field use that I'm working on.
It is operated by wheelchair
motors and controllers.
It’s still in the prototype stage.


Stepper motor control is a tricky business. Fortunately for
me, the Cognisys controllers enable usage of stepper
motors without having to go through a program involving a keyboard and
programming, There are
keypad strokes and a kind of programming, but not as complicated as CAD
systems.
By "tweaking" the controls, I'm able to change the characteristics of
the motors
which has a profound impact on the resultant images.
The miniaturization of my large robots has been extremely difficult and
expensive.
Without the history of having built my early woodworking robots
from
new
and salvaged materials this project would not have been possible.

Abstract Image made in part, with Mark Lindquist's CNC
robot RC-ACR II, January, 2016.
In-camera creation - single exposure. RAW image, minimally edited in
Photoshop.
Copyright ©
Lindquist Studios 2015/2016
All Rights Reserved

Mark Lindquist with his robot OPRA, Lindquist Studios, 2007
Photo: John McFadden
Article © Mark Lindquist 1/23/2016
All Rights Reserved
Copyright ©
Lindquist Studios 2016
All Rights Reserved
Photos: Mark Lindquist, John McFadden, Roger Paph
Visit:
http://cognisys-inc.com
http://picengrave.com
http://johnmcfadden.net
|